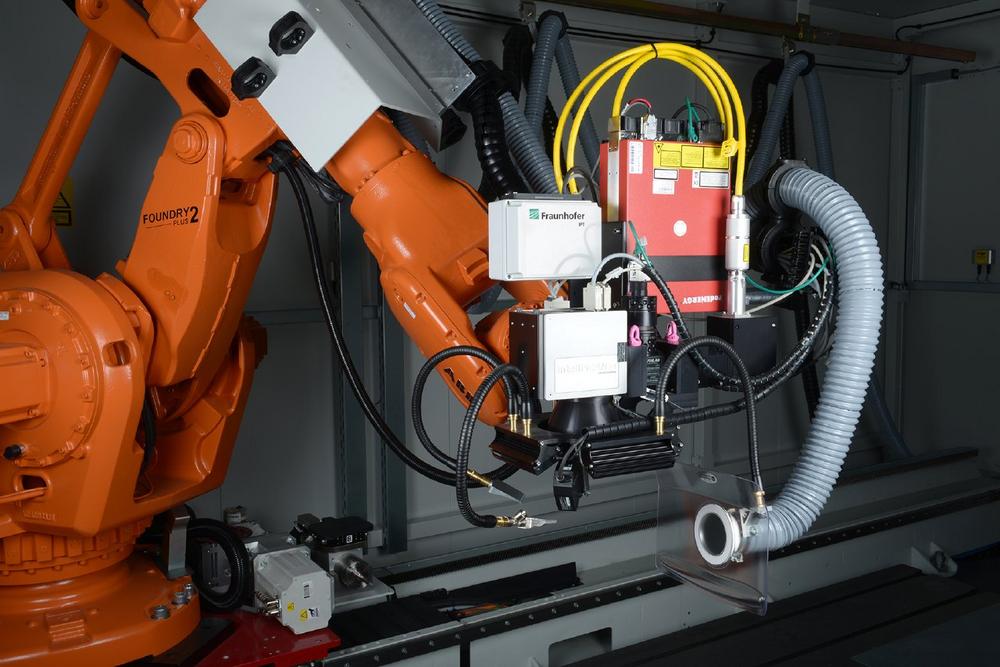
Die Aachener Ingenieure kompensieren die systembedingten Ungenauigkeiten des Roboters durch eine kamerabasierte, intelligente Positioniermethode: Zuerst werden mit dem Laser auf der zu strukturierenden Oberfläche Markierungen eingebracht, die später als Ankerpunkte für die Textur dienen. Der Roboter muss nun für das Strukturieren den Laser an die richtige Stelle bewegen. Hierbei wird die Ungenauigkeit des Roboters toleriert und die Abweichung von der geplanten Position anhand einer integrierten Kamera erkannt, die sowohl die Markierungen als auch die Strukturbereiche identifiziert. Mit diesen Informationen wird die abweichende Position des Roboters bereits vor der Strukturierung bestimmt und kann über eine adaptive Bahnplanung korrigiert werden, sodass die Oberfläche nahtlos strukturiert wird. Die anfangs eingebrachten Markierungen verschwinden Schicht für Schicht durch die Strukturierung des Lasers.
Das neue System befähigt den Industrieroboter, großflächig und hochpräzise mit dem Laser zu strukturieren, ganz ohne den zusätzlichen Einsatz kosten- und wartungsintensiver Technik. So gelingt es den Partnern, ein Großraumlasersystem zu entwickeln, das gegenüber konventionellen Systemen nicht nur robuster, sondern auch kostengünstiger ist.
Schnittstelle zur Multi-Technologie-Plattform
Das neue System lässt sich in das eigens vom Fraunhofer IPT entwickelte »Multi-Technology Robot System for Adaptive Manufacturing MIRA« integrieren. MIRA bündelt mehrere Fertigungstechnologien wie das Bohren, Polieren oder Schleifen mittels einer Adapterplatte am Roboterkopf in einer einzigen lasergeschützten Roboterzelle. Dadurch lassen sich verschiedene Fertigungstechnologien in einem einzigen hybriden Fertigungssystem integrieren und so Rüst- und Nebenzeiten erheblich reduzieren. Neben den verschiedenen Fertigungstechnologien ist ein 3D-Digitalisierungssystem integriert, durch das sich die Qualität der einzelnen Fertigungsschritte ohne Umspannen überprüfen lässt. Der Industrieroboter ist auf einer Linearachse befestigt, wodurch sich die gesamte Aufspannfläche von 4 x 2,5 Meter ausnutzen lässt.
Projektkonsortium
- Fraunhofer-Institut für Produktionstechnologie IPT, Aachen (Projektkoordination)
- ModuleWorks GmbH, Aachen (adaptive Werkzeugbahnberechnung)
- Zertrox GmbH & Co. KG, Aachen (Bildanalyse)
- Eschmann Textures International GmbH, Gummersbach (Evaluierung)
Das Forschungsprojekt RoboTex wurde während seiner Laufzeit vom 1.7.2016 bis 30.6.2019 aus Mitteln des Europäischen Fonds für regionale Entwicklung (EFRE) gefördert (Förderkennzeichen: EFRE-0800314).
Das Fraunhofer-Institut für Produktionstechnologie IPT vereint langjähriges Wissen und Erfahrung aus allen Gebieten der Produktionstechnik. In den Bereichen Prozesstechnologie, Produktionsmaschinen, Produktionsqualität und Messtechnik sowie Technologiemanagement bietet das Fraunhofer IPT seinen Kunden und Projektpartnern angewandte Forschung und Entwicklung für die vernetzte, adaptive Produktion. Das Leistungsspektrum des Instituts orientiert sich an den individuellen Aufgaben und Herausforderungen innerhalb bestimmter Branchen, Technologien und Produktbereiche, darunter Automobilbau und -zulieferer, Energie, Life Sciences, Luftfahrt, Maschinen- und Anlagenbau, Optik, Präzisions- und Mikrotechnik sowie Werkzeug- und Formenbau.
Fraunhofer-Institut für Produktionstechnologie IPT
Steinbachstraße 17
52074 Aachen
Telefon: + 49 241 8904-0
Telefax: + 49 2 41 8904-198
http://www.ipt.fraunhofer.de
Externe und interne Kommunikation
Telefon: +49 (241) 8904-326
E-Mail: presse@ipt.fraunhofer.de
Telefon: +49 241 8904-312
E-Mail: martin.kohse@ipt.fraunhofer.de
![]()